
S I M U L A T I O N L I V E
4DV-SIMULATOR est une plateforme de simulation 3D Temps-Réel et
Hardware-In-the-Loop utilisée pour le développement de systèmes robotiques : véhicules, robots et drones.
Elle vous permet de simuler vos systèmes intelligents dans un environnement virtuel 3D proche des cas d’usage opérationnels.
Son niveau de réalisme et ses capacités permettent de tester et de valider tous types d’applications robotiques intégrant des systèmes de perception,
de contrôle-commande, de traitement du signal, d’informatique embarquée, ainsi que des applications sans fil.
4DV – SIMULATOR
S I M U L A T I O N L I V E
4DV-SIMULATOR est une plateforme de simulation 3D Temps-Réel et Hardware-In-the-Loop utilisée pour le développement de systèmes robotiques : véhicules, robots et drones.
Elle vous permet de simuler vos systèmes intelligents dans un environnement virtuel 3D proche des cas d’usage opérationnels.
Son niveau de réalisme et ses capacités permettent de tester et de valider tous types d’applications robotiques intégrant des systèmes de perception, de contrôle-commande, de traitement du signal, d’informatique embarquée, ainsi que des applications sans fil.
Différents types de capteurs
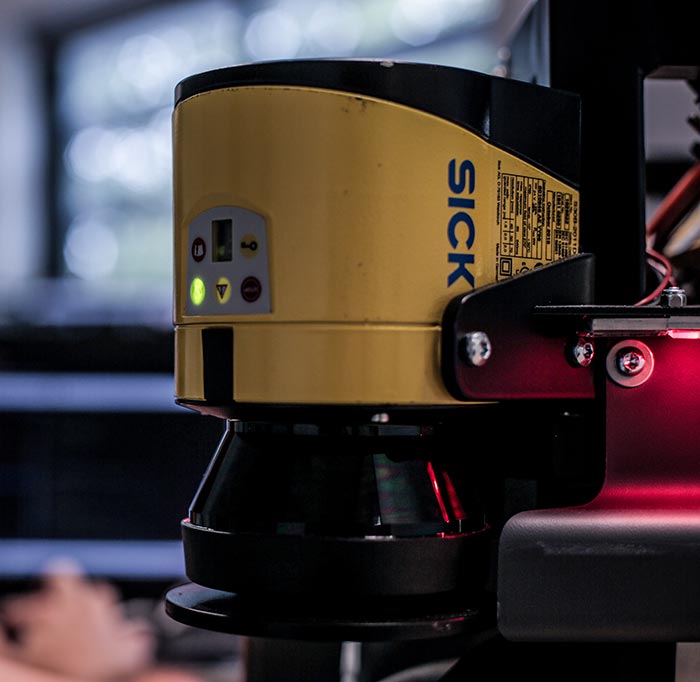
4D-Virtualiz apporte son expertise en robotique afin de proposer des modèles capteurs conformes à leurs homologues réels : mode de fonctionnement, interactions avec l’environnement, perturbations, performances et caractéristiques hardware (connectiques, médias, protocoles).
Ces capteurs sont d’une part exploités dans 4DV-SIMULATOR au travers de modèles génériques entièrement paramétrables ; ou d’autre part configurés et émulés conformément aux capteurs disponibles dans le commerce destinés à être embarqués sur vos systèmes réels.
Types de capteurs disponibles :
- Caméra perspective
- Caméra FishEye
- Caméra omnidirectionnelle
- Caméra de profondeur
- Caméra de normales
- Caméra sémantique
- Lidar 2D
- Lidar 3D
- Centrale inertielle (IMU)
- GNSS
- Altimètre
- Gyromètre
- Anémomètre
- Odométrie
- Capteur de position
Différents types de capteurs
4D-Virtualiz apporte son expertise en robotique afin de proposer des modèles capteurs conformes à leurs homologues réels : mode de fonctionnement, interactions avec l’environnement, perturbations, performances et caractéristiques hardware (connectiques, médias, protocoles).
Ces capteurs sont d’une part exploités dans 4DV-SIMULATOR au travers de modèles génériques entièrement paramétrables ; ou d’autre part configurés et émulés conformément aux capteurs disponibles dans le commerce destinés à être embarqués sur vos systèmes réels.
- Caméra perspective
- Caméra FishEye
- Caméra omnidirectionnelle
- Caméra de profondeur
- Caméra de normales
- Caméra sémantique
- Lidar 2D
- Lidar 3D
- Centrale inertielle (IMU)
- GNSS
- Altimètre
- Gyromètre
- Anémomètre
- Odométrie
- Capteur de position
Capteurs propriétaires implémentés





Différents types de systèmes
4DV-SIMULATOR utilise des modèles représentatifs de systèmes robotiques : véhicules, robots, drones, bras articulés.
Le comportement dynamique de ces systèmes respectent les contraintes de leurs homologues réels comme par exemple leur capacité de franchissement, de stabilité, leur comportement compte tenu du contact roue/sol, leur réaction face à la perturbation du vent pour les drones, la gestion des collisions, etc.
Types de systèmes simulables :
- Véhicules à roues
- Véhicules à un ou plusieurs trains directeurs
- Véhicules multi-roues motrices
- Véhicules sur rails
- Systèmes à chenilles
- Drones multi-rotors
- Engins à tourelle
- Engins de TP
- Engins agricoles
- Nacelle
- Chariot élévateur
- Attelage et système poly-articulé
- Bras poly-articulé
Différents types de systèmes
4DV-SIMULATOR utilise des modèles représentatifs de systèmes robotiques : véhicules, robots, drones, bras articulés.
Le comportement dynamique de ces systèmes respectent les contraintes de leurs homologues réels comme par exemple leur capacité de franchissement, de stabilité, leur comportement compte tenu du contact roue/sol, leur réaction face à la perturbation du vent pour les drones, la gestion des collisions, etc.
Types de systèmes simulables :
- Véhicules à roues
- Véhicules à un ou plusieurs trains directeurs
- Véhicules multi-roues motrices
- Véhicules sur rails
- Systèmes à chenilles
- Drones multi-rotors
- Engins à tourelle
- Engins de TP
- Engins agricoles
- Nacelle
- Chariot élévateur
- Attelage et système poly-articulé
- Bras poly-articulé
Une simulation ouverte
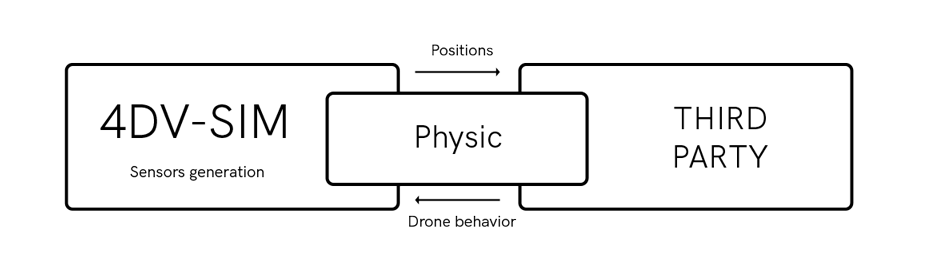
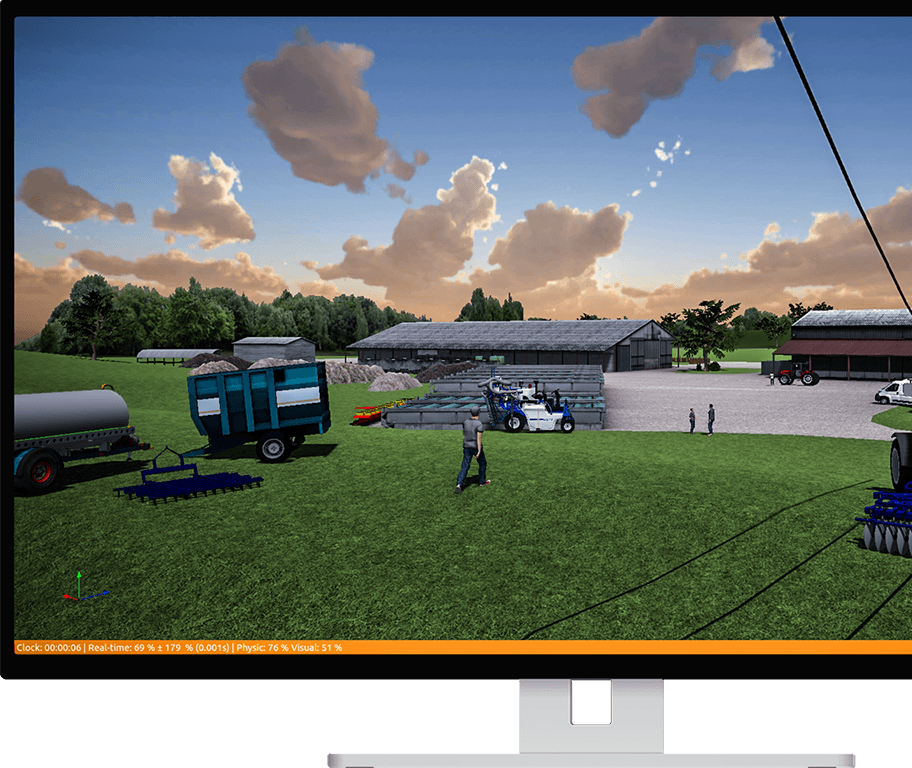
4DV-SIMULATOR est destiné à être directement connecté avec vos matériels (carte d’acquisition, système de pilotage, calculateurs, station de travail, automates, etc). Cette interface H.I.L. (Hardware-In-the-Loop) assure une intégration efficace de vos applications de perception, de contrôle commande, ainsi que le développement de votre I.A. embarquée ou la configuration de vos systèmes de communication.
Après la validation du comportement de vos applications en simulation, vous exploitez immédiatement les résultats de vos développements en phase de mise au point réelle.
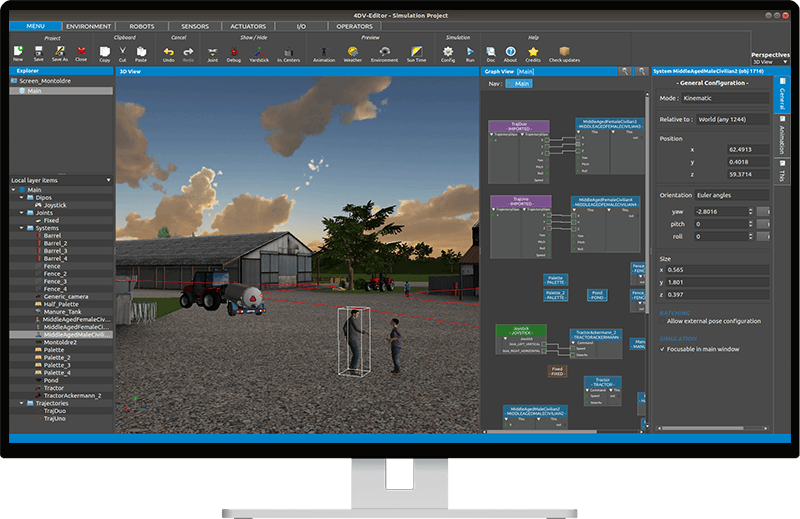
4DV-SIMULATOR est une plateforme ouverte pour la co-simulation avec d’autres outils de modélisation et de simulation. Vous définissez dans 4DV-EDITOR les méthodes de communication ainsi que les données échangées afin de personnaliser votre architecture de développement et de tests.

Une simulation ouverte
4DV-SIMULATOR est destiné à être directement connecté avec vos matériels (carte d’acquisition, système de pilotage, calculateurs, station de travail, automates, etc). Cette interface H.I.L. (Hardware-In-the-Loop) assure une intégration efficace de vos applications de perception, de contrôle commande, ainsi que le développement de votre I.A. embarquée ou la configuration de vos systèmes de communication.
Après la validation du comportement de vos applications en simulation, vous exploitez immédiatement les résultats de vos développements en phase de mise au point réelle.
4DV-SIMULATOR est une plateforme ouverte pour la co-simulation avec d’autres outils de modélisation et de simulation. Vous définissez dans 4DV-EDITOR les méthodes de communication ainsi que les données échangées afin de personnaliser votre architecture de développement et de tests.
Principe de
modélisation réaliste
Les experts en simulation de 4D-Virtualiz travaillent pour adapter et vous proposer des outils optimisés et réalistes qui maximisent les capacités de vos simulations multi agents et multi systèmes. Vous avez ainsi la possibilité de construire des jumeaux numériques intégrant une instrumentation multi-capteurs.
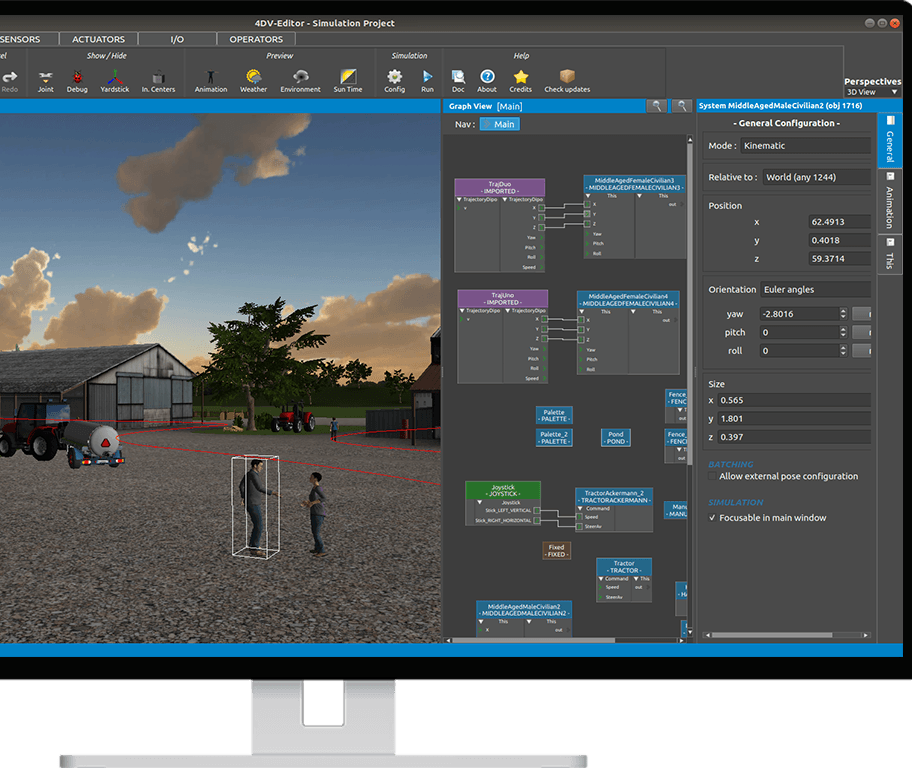
D’une part, la technologie de 4DV-SIMULATOR est constituée de différents moteurs de calculs (rendu visuel, calcul physique, gestion des agents, etc).
Ces éléments interagissent de manière cohérente, grâce à un moteur spécifique breveté, garantissant une simulation fonctionnelle 3D temps-réel.
D’autre part, 4DV-SIM s’adapte à vos besoins de simulations grâce au caractère évolutif de son architecture matérielle multi-calculateurs (ajout de cartes périphériques, de capacités de calculs) et ainsi que par sa structuration logicielle.
Principe de
modélisation réaliste
Les experts en simulation de 4D-Virtualiz travaillent pour adapter et vous proposer des outils optimisés et réalistes qui maximisent les capacités de vos simulations multi agents et multi systèmes. Vous avez ainsi la possibilité de construire des jumeaux numériques intégrant une instrumentation multi-capteurs.
D’une part, la technologie de 4DV-SIMULATOR est constituée de différents moteurs de calculs (rendu visuel, calcul physique, gestion des agents, etc).
Ces éléments interagissent de manière cohérente, grâce à un moteur spécifique breveté, garantissant une simulation fonctionnelle 3D temps-réel.
D’autre part, 4DV-SIM s’adapte à vos besoins de simulations grâce au caractère évolutif de son architecture matérielle multi-calculateurs (ajout de cartes périphériques, de capacités de calculs) et ainsi que par sa structuration logicielle.
Ressources
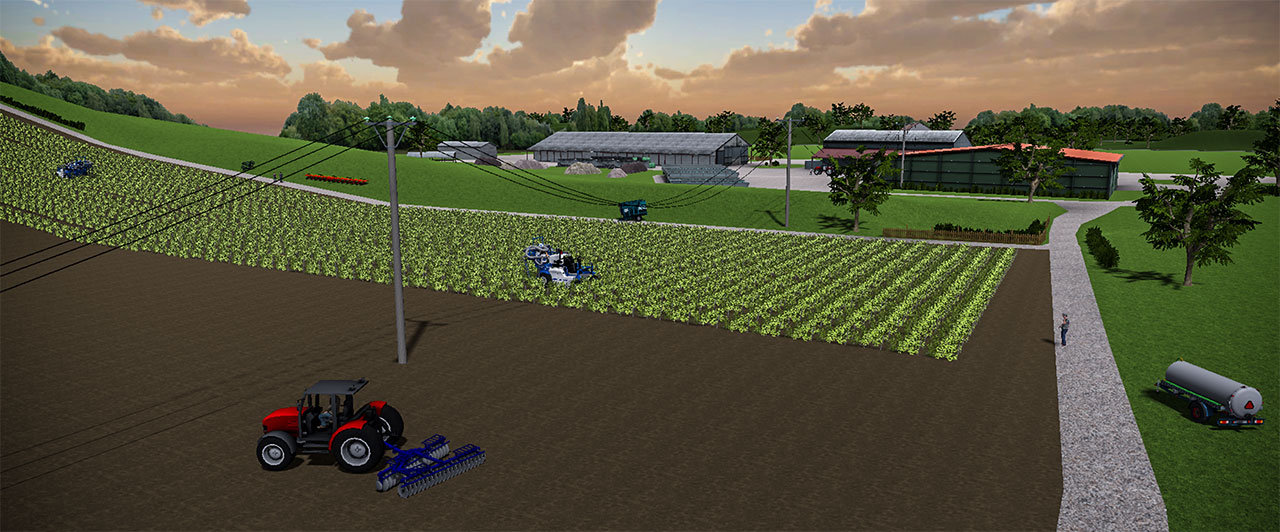
4DV-SIMULATOR vous permet de simuler l’ensemble de la bibliothèque de modèles disponibles dans 4DV-EDITOR. En plus des modèles capteurs et systèmes, vous trouverez des modèles environnements, objets et agents :
Environnements
- Outdoor : offroad, urbain, autoroute, etc
- Indoor : parking, bâtiment, usine, etc
- Reproductions d’environnements réels
Objets
- Mobilier urbain, signalisation, etc
- Armement, végétation, etc
Agents cinématiques et dynamiques
- Véhicules civils et militaires
- Piétons, soldats, menaces
- Robots et drones
Ressources

4DV-SIMULATOR vous permet de simuler l’ensemble de la bibliothèque de modèles disponibles dans 4DV-EDITOR. En plus des modèles capteurs et systèmes, vous trouverez des modèles environnements, objets et agents :
Environnements
- Outdoor : offroad, urbain, autoroute, etc
- Indoor : parking, bâtiment, usine, etc
- Reproductions d’environnements réels
Objets
- Mobilier urbain, signalisation, etc
- Armement, végétation, etc
Agents cinématiques et dynamiques
- Véhicules civils et militaires
- Piétons, soldats, menaces
- Robots et drones
